Pri digitálnom prenose sa využíva skoková zmena signálu. Priebeh tohto signálu má tvar hranatej krivky, na rozdiel od analógového prenosu, kde signál má tvar podobný sínusoide. Skokové zmeny signálov sa realizujú po krátkych časových intervaloch. Vyslanie každého jedného signálu teda trvá určitý čas. Je dôležité, aby vysielač aj prijímač sa vedeli zosynchronizovať, t.j. aby prijímač vedel, ako často sa má zisťovať hodnota signálu, ktorý sa vysiela. Takéto pravidelné zisťovanie hodnoty signálu sa realizuje s pomocou časovača a nazýva sa vzorkovanie signálu.
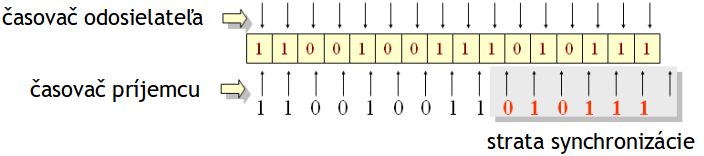
Dokonale zosynchronizovať časovač čítania a vysielania nie je možné bez priebežnej synchronizačnej informácie. Táto synchronizačná informácia slúži na zladenie časovačov riadiacich zmenu signálu vo vysielači a čítanie zmeny signálu v prijímači, ktoré sa opäť po čase rozchádzajú. Na nasledujúcom obrázku je znázornená situácia, kedy sa po synchronizácii rozchádzajú časovače, lebo každý ma trochu inú frekvenciu vzorkovania signálu a teda dĺžku jedného tiku časovača. To má za následok, že prijímač neprijme rovnakú informáciu, akú vysielal vysielač, čo je, samozrejme, nežiaduce.
6.2.1 Asynchrónny prenos
Pri asynchrónnom prenose sa synchronizujú časovače vysielača a prijímača iba vtedy, keď ideme preniesť nejaké dáta. Používa sa takzvaná štart-stop metóda. Táto metóda predpokladá nejaký odhad počtu tikov časovača (obvykle 5 až 8), pri ktorom je ešte predpoklad, že počas ich vysielania nenastane strata synchronizácie. Signál štart zosynchronizuje časovače, po ňom sa vysielajú signály reprezentujúce zopár bitov (5-8), po ktorom sa vyšle signál stop. Ak potrebujem vyslať ešte ďalšie bity, vyšlem opäť štart signál (zosynchronizujem časovače) so signálmi kódujúcimi dátové bity a signálom stop. Využitie takéhoto kanála nie je stopercentné kvôli signálom štart a stop a časom medzi signálom stop a následným signálom štart. Táto synchronizačná metóda sa využíva na komunikáciu cez sériové rozhranie počítača (COM port), ktoré sa už v súčasnosti v praxi nepoužíva.
6.2.2 Synchrónny prenos
Pri synchrónnom prenose synchronizujeme časovače priebežne. Najjednoduchším spôsobom synchronizácie je vysielanie tikov časovača v jednom komunikačnom kanáli a dáta v inom komunikačnom kanáli. To však vyžaduje dva kanály, čo pri komunikácii na väčšie vzdialenosti môže byť drahé. Využitie takejto synchronizácie je napríklad na zberniciach počítačových komponentov.
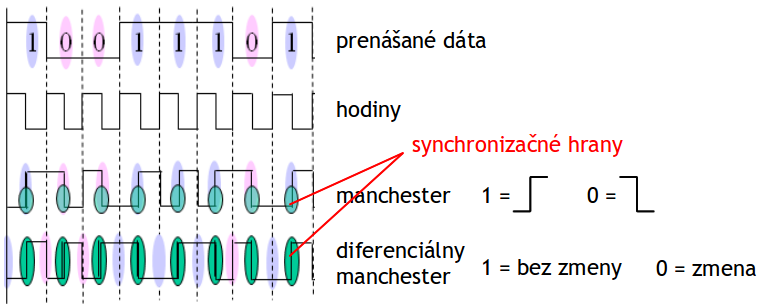
Ak máme k dispozícii iba jeden kanál, musíme kombinovať dáta a synchronizačné informácie. V Ethernete sa používa kódovanie manchester, ktoré na zakódovanie jedného bitu využíva vždy dve rôzne hodnoty signálu. Bitový interval teda obsahuje dve hodnoty signálu. Bit s hodnotou 1 je zakódovaný signálom s nízkou hodnotou sledovaného parametra komunikačného kanála nasledovaným signálom s vysokou hodnotou. Bit s hodnotou 0 je zakódovaný signálom s vysokou hodnotou nasledovaným signálom s nízkou hodnotou. Zmena signálu teda nastáva pri ľubovoľnej bitovej hodnote. Moment zmeny signálu, takzvaná synchronizačná hrana, sa dá zistiť elektronickými súčiastkami a použiť na synchronizáciu časovača. Synchronizácia teda nastáva pri každom odoslanom bite.
Modifikáciou kódovania manchester je diferenciálny manchester. Používa ho napríklad technológia IBM Token Ring. V tomto kódovaní sú synchronizačné hrany vždy medzi dvojicami signálov, ktoré predstavujú bitovú hodnotu. Diferenciálny manchester kóduje hodnotu 0 tak, že zmení stav komunikačného kanála na opačný (ak bol signál s vysokou hodnotou meranej veličiny, tak ho zmení na signál s nízkou hodnotou, alebo naopak signál s nízkou hodnotou zmení na signál s vysokou hodnotou). Hodnota 1 je zakódovaná tak, že ponechá stav komunikačného kanála a teda aj signál nezmenený.
Na hodnotenie efektivity využitia kanála využívame modulačnú a prenosovú rýchlosť. Prenosovú rýchlosť už poznáme, je to počet bitov prenesený za jednotku času. Modulačná rýchlosť je priemerný počet čítaní signálu príjemcom na získanie binárnej informácie za jednotku času (vzorkovanie signálu) a uvádza sa v jednotkách Baud [Bd] (počet zmien za sekundu) podľa J. M. É. Baudota.
Manchester aj diferenciálny manchester majú modulačnú rýchlosť dvojnásobnú oproti prenosovej rýchlosti, keďže na zistenie hodnoty jedného bitu musíme prečítať signál dvakrát. Na zvýšenie efektivity a teda aj prenosovej rýchlosti potrebujeme kódovať signál tak, aby sme synchronizáciu časovačov realizovali menej často ako pri každom bite. Inými slovami chceme, aby sa prenosová rýchlosť priblížila modulačnej.
Vieme, že synchronizácia sa dá realizovať pri zmene hodnoty signálu. Najprirodzenejším spôsobom je reprezentovať hodnotu 1 vysokou hodnotou meranej veličiny a hodnotu 0 nízkou hodnotou meranej veličiny (takzvané kódovanie NRZ – non return to zero). Pokiaľ sa hodnoty 1 a 0 menia často, synchronizácia je dostatočná. Ak však potrebujeme vysielať dlhú sekvenciu núl alebo dlhú sekvenciu jednotiek, k žiadnym zmenám signálu nedôjde a nemáme príležitosť synchronizovať časovače.
Túto nepríjemnú vlastnosť môžeme eliminovať tak, že si povieme, po koľkých bitoch vyžadujeme synchronizáciu. Nech je to k bitov. Potom, ak bude sekvencia k rovnakých hodnôt, tak sa vsunie jedna opačná hodnota, o ktorej odosielateľ aj príjemca vedia, že nejde o dátový, ale o synchronizačný bit.
Iným spôsobom vynútenia zmeny signálu je vytvorenie mapovania všetkých možných k-tic bitov na také (k+1)-tice bitov, ktoré sú vo vnútri dostatočne rôzne. Potom na základe známej prevodovej tabuľky vie príjemca preložiť každú (k+1)-ticu na pôvodnú k-ticu. Čím vyššie je k, tým väčšia je prenosová rýchlosť.
Signál nemusí byť len dvojúrovňový. ale napríklad aj troj- alebo viacúrovňový, kde už sa dá riešiť synchronizácia efektívnejšie a navyše je možné použiť také kódovanie, že modulačná rýchlosť je nižšia ako prenosová, lebo jednou úrovňou môžeme reprezentovať napríklad dvojice (ak máme aspoň 4 úrovne signálu) alebo trojice bitov(ak máme aspoň 8 úrovní signálu).